|
pyboard 的快速参考 以下引脚分配适用于 PYBv1.1。您还可以查看其他版本的 pyboard 的引脚排列: PYBv1.0 或PYBLITEv1.0-AC 或 PYBLITEv1.0. 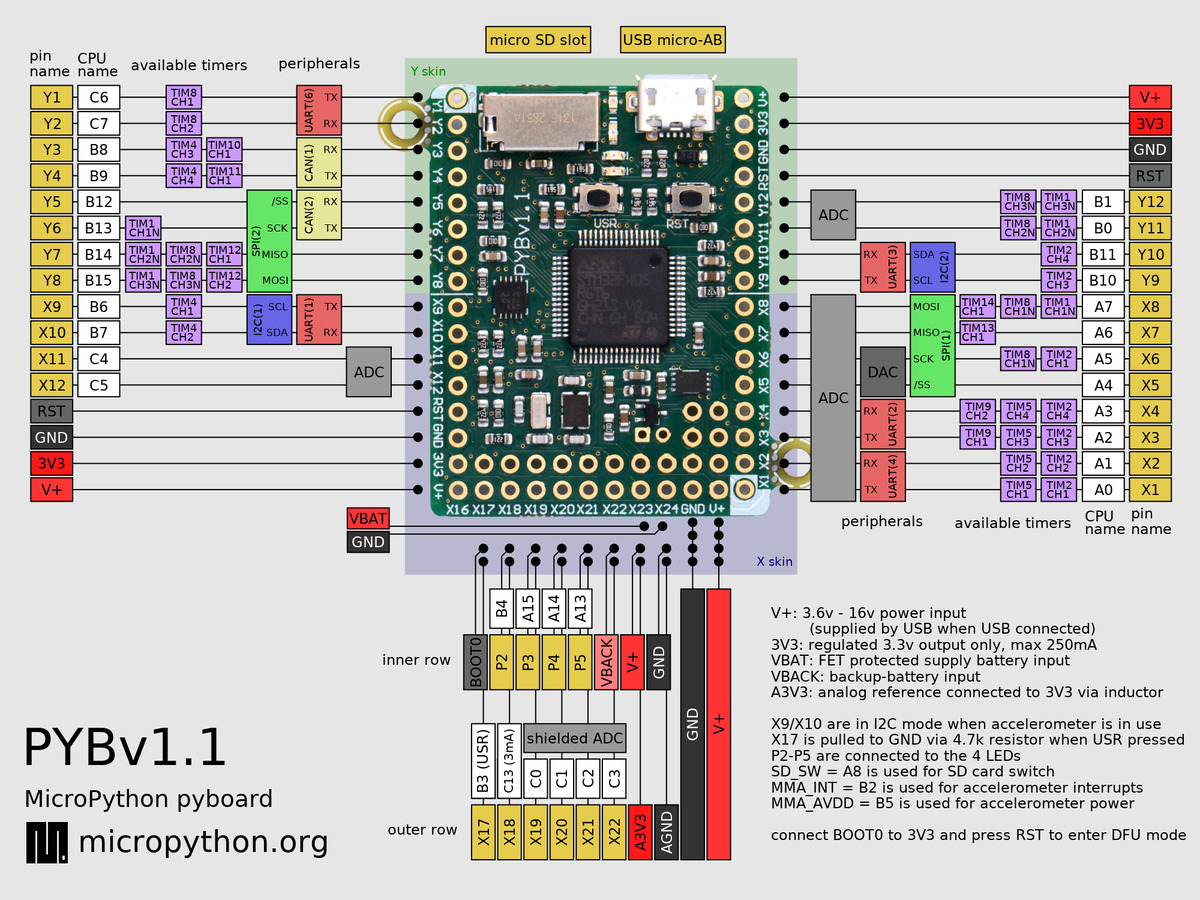 下面是 pyboard 的快速参考。如果这是您第一次使用该板,请考虑先阅读以下部分:
# J; v" g' j/ ~ Y. p. A通用板控制见 pyb. - import pyb
$ K) i' \+ N' R! [& } - ^' K' H) r' H0 X% J
- pyb.repl_uart(pyb.UART(1, 9600)) # duplicate REPL on UART(1)
7 O, T' ^/ }3 _ x* a - pyb.wfi() # pause CPU, waiting for interrupt
+ u4 F$ i( g: [2 d' v9 Y# z' X# U0 ^ - pyb.freq() # get CPU and bus frequencies1 Z7 E. m" m( }" G5 V
- pyb.freq(60000000) # set CPU freq to 60MHz
. x) s- k) I R& w - pyb.stop() # stop CPU, waiting for external interrupt
8 Y; L* g; e. n4 S- }
7 B9 e: Q3 k3 C8 d/ e2 {+ w延迟和计时使用 time模块: - import time
) I( v; z1 z2 S( Y( }9 \ - % _: J& s. [4 Y2 ?0 |3 P2 {# S
- time.sleep(1) # sleep for 1 second
( t+ ~4 h: z6 S& Z, H, N - time.sleep_ms(500) # sleep for 500 milliseconds
# ?4 u# }, M1 v) E - time.sleep_us(10) # sleep for 10 microseconds" m+ {% ~4 A+ r
- start = time.ticks_ms() # get value of millisecond counter
1 X8 ^2 C7 e4 Y1 D) E - delta = time.ticks_diff(time.ticks_ms(), start) # compute time difference
7 l1 D x/ C- F$ U2 T: R/ }" a7 N* {8 l' W. U4 o8 g7 T4 f% R1 }1 I
内部 LED见 pyb.LED. - from pyb import LED
- ]0 B/ l1 \8 b0 f- }
% ]. j2 p" i6 a- led = LED(1) # 1=red, 2=green, 3=yellow, 4=blue
) x1 K0 f$ [: v$ n' H - led.toggle()+ i/ C' I, `, D1 l8 [ n( v
- led.on(), X u# d9 ^9 L# j+ b, }( L. {
- led.off()5 G. V. M3 @4 @" ^6 D& }( |
- % f, p2 T% {% e! d' C
- # LEDs 3 and 4 support PWM intensity (0-255)% a1 y2 J* K6 M' f4 r5 k
- LED(4).intensity() # get intensity8 V8 C/ ]" h- x. S' Z7 @3 g7 D
- LED(4).intensity(128) # set intensity to half
6 e* S( w% T; E# X2 y# D' x4 `% O内部开关请参阅 pyb.Switch. - from pyb import Switch: @$ s# E" |; P" B; j- s
8 j( l3 U2 Z) Z8 `% b" N- sw = Switch()
# d# ~3 ~3 |2 d" c - sw.value() # returns True or False0 I% \* [- Y4 s; U* U6 g7 d7 R0 n
- sw.callback(lambda: pyb.LED(1).toggle())
5 Y- d( O% d1 F/ Y- ^4 k& ^2 I, _8 e4 [5 G/ h! ?
引脚和 GPIO请参阅 pyb.Pin. - from pyb import Pin
/ f" Y7 w! t5 b8 m - - c9 F7 S3 q8 p( {: e
- p_out = Pin('X1', Pin.OUT_PP)
F( V1 i! k' M - p_out.high()
/ _6 d# Z1 v( I5 a% ?0 ~ - p_out.low()' V2 J2 d \) [6 R& o; b
- - y5 U3 c, p6 \7 O( V7 C2 Z
- p_in = Pin('X2', Pin.IN, Pin.PULL_UP)
! s* d& ~ ]; l0 s' b, c! P# C - p_in.value() # get value, 0 or 1
6 @$ G" u- l- j* w1 Y; O
! P$ l8 v4 V, G$ W# {, K$ w伺服控制请参阅pyb.Servo. - from pyb import Servo
) W, f1 W* T$ [' a; \ - # W8 O! ^- p( D) S+ h; a+ @
- s1 = Servo(1) # servo on position 1 (X1, VIN, GND)9 Z# U% N" o+ U6 M, E7 ^
- s1.angle(45) # move to 45 degrees% j8 e0 W" q' Y! d& W$ }; A
- s1.angle(-60, 1500) # move to -60 degrees in 1500ms! d, A' q+ {% l8 \* P5 O+ S; s
- s1.speed(50) # for continuous rotation servos
3 d$ M5 l6 }$ c9 A7 B* q8 r0 f% ?, f/ t
外部中断请参阅 pyb.ExtInt. - from pyb import Pin, ExtInt
) K0 L8 a6 A9 B1 Z3 U9 T - ( i- E `! V- S' m. M7 r# v
- callback = lambda e: print("intr")
( R8 V/ ~) _' G) @/ }9 ` - ext = ExtInt(Pin('Y1'), ExtInt.IRQ_RISING, Pin.PULL_NONE, callback)
, ` k4 g: q; Z' H) o& @: j计时器请参阅pyb.Timer. - from pyb import Timer7 h9 r0 b5 T6 G u+ H9 ~$ c
& ^1 `, j$ W' n- tim = Timer(1, freq=1000)
( ^4 G0 L. E( u - tim.counter() # get counter value* v9 \) o. t" h% T4 g) C& [
- tim.freq(0.5) # 0.5 Hz
+ f& R; g& }4 r, g$ V2 ~; L( F - tim.callback(lambda t: pyb.LED(1).toggle())
$ ^9 }! x9 g& BRTC(实时时钟)请参阅 pyb.RTC - from pyb import RTC
4 `9 z( ], f" l( O
4 u! k4 J. ~' p2 ]# L0 r3 f- rtc = RTC()5 ?& ]8 P! j; l2 K0 M
- rtc.datetime((2017, 8, 23, 1, 12, 48, 0, 0)) # set a specific date and time
0 V' T. J" A) D: l% c. f - rtc.datetime() # get date and time
PWM(脉宽调制)请参阅pyb.Pin 和 pyb.Timer. - from pyb import Pin, Timer2 U# P! W- a! u7 e) _+ e
. d/ C7 I# |: R6 v- p = Pin('X1') # X1 has TIM2, CH1
4 q/ i; ~7 A$ w+ W - tim = Timer(2, freq=1000)
- @1 G# }% J+ w1 y6 K - ch = tim.channel(1, Timer.PWM, pin=p)& c6 a+ m/ U% T6 {2 X& h. ?/ W# T
- ch.pulse_width_percent(50)
ADC(模数转换)请参阅pyb.Pin 和pyb.ADC. - from pyb import Pin, ADC
5 O" [# x' ]+ _0 x: y7 B1 M& F" e; c
( W$ t" Y4 r# g/ l, w8 A- adc = ADC(Pin('X19'))
0 t$ }" J# t# T C! P y7 ?+ _; ? - adc.read() # read value, 0-4095
' Y* o1 i. h b% I! m- dDAC(数模转换)请参阅pyb.Pin 和 pyb.DAC. - from pyb import Pin, DAC
& w+ ~4 [$ Z" y- i# f' h8 \! O - ) h% `' F9 D" y3 D
- dac = DAC(Pin('X5'))! T( B) ]7 N8 t# \" j7 h
- dac.write(120) # output between 0 and 255
- S+ A3 E* Q) FUART(串行总线)请参阅 pyb.UART. - from pyb import UART
2 _ l) |1 N, b0 T2 n
# }) V9 Q" m. t' B3 r* f$ S- uart = UART(1, 9600)
$ [& b1 P& B8 K- `" A+ e - uart.write('hello')
( W: q z, E. {" ?* V: y - uart.read(5) # read up to 5 bytes
7 y. f; m! ~: \$ F R3 eSPI总线请参阅 pyb.SPI. - from pyb import SPI: [' w4 e; M- ] M2 v& }5 D
$ R$ p& e* ?1 }, ]: X2 Q- P, v* M+ i& O- spi = SPI(1, SPI.MASTER, baudrate=200000, polarity=1, phase=0)4 a; q" F9 W" F7 O5 o% \" I
- spi.send('hello')8 h @0 z; \! u( a0 K6 P
- spi.recv(5) # receive 5 bytes on the bus Y9 r$ O/ w; C5 C/ b' [ }+ A
- spi.send_recv('hello') # send and receive 5 bytes
" A( w! f% A" k* n
* F2 r7 P, p H- x+ v5 iI2C总线硬件 I2C 可通过I2C('X') 和用于 pyboard 的 X 和 Y 两半 I2C('Y')。或者,传入外围设备的整数标识符,例如I2C(1)。通过显式指定 scl 和 sda 引脚而不是总线名称,也可以使用软件 I2C 。有关更多详细信息,请参阅 machine.I2C. - from machine import I2C
n' f1 }5 x- i7 d. z, N3 X - ! j$ P6 M8 M( u) \- Y5 g- t
- i2c = I2C('X', freq=400000) # create hardware I2c object8 z$ A N$ L: k2 F& p
- i2c = I2C(scl='X1', sda='X2', freq=100000) # create software I2C object+ m; w( C7 O3 H$ u6 v8 E
4 W/ K4 k/ \4 E- i2c.scan() # returns list of slave addresses
7 G" h& ~) |% S: j - i2c.writeto(0x42, 'hello') # write 5 bytes to slave with address 0x425 o L* V8 V# V/ ?4 d# h
- i2c.readfrom(0x42, 5) # read 5 bytes from slave4 @2 o+ F. P( ? t% X4 x
5 [4 w- r; u7 j1 P0 j* D0 V: {# F- i2c.readfrom_mem(0x42, 0x10, 2) # read 2 bytes from slave 0x42, slave memory 0x10
% L+ [) `9 ~: |" I. z0 r( t - i2c.writeto_mem(0x42, 0x10, 'xy') # write 2 bytes to slave 0x42, slave memory 0x10
, Z& C, T, Y. k" ^) O- S
注意:对于传统 I2C 支持,请参阅 pyb.I2C。
8 U2 g" R3 T! R+ I2 c: h4 U M! ^2 q( ?I2S总线参见 machine.I2S. - from machine import I2S, Pin3 \9 U! ^$ g9 w V1 o
2 X9 r/ A4 j* T* a- i2s = I2S(2, sck=Pin('Y6'), ws=Pin('Y5'), sd=Pin('Y8'), mode=I2S.TX, bits=16, format=I2S.STEREO, rate=44100, ibuf=40000) # create I2S object" p+ B7 G. l* H+ D% D5 z- A1 j2 l6 Z j% d
- i2s.write(buf) # write buffer of audio samples to I2S device
# @8 t5 Y$ N8 Y& Q) ~
3 A, N0 F" {0 [& p- i2s = I2S(1, sck=Pin('X5'), ws=Pin('X6'), sd=Pin('Y4'), mode=I2S.RX, bits=16, format=I2S.MONO, rate=22050, ibuf=40000) # create I2S object
( m/ E9 v5 |0 [( y - i2s.readinto(buf) # fill buffer with audio samples from I2S device
I2S 类目前作为技术预览版提供。在预览期间,鼓励用户提供反馈。基于此反馈,I2S 类 API 和实现可能会更改。 PYBv1.0/v1.1 有一个 I2S 总线,id=2。PYBD-SFxW 有两条 I2S 总线,id=1 和 id=2。I2S 与 SPI 共享。 5 c4 H) [$ {/ a$ @1 Y7 J3 X& d
CAN总线(控制器局域网)参见 pyb.CAN. - from pyb import CAN
; f; b; D9 C0 V+ B - * x6 d. r' m8 L! n
- can = CAN(1, CAN.LOOPBACK)6 D! ~7 Z* `: g. k) S1 Q! Y, V
- can.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126))& S' U/ U+ Q% M+ ], w0 ^
- can.send('message!', 123) # send a message with id 123: Z$ k4 \% O7 z. o* {+ |
- can.recv(0) # receive message on FIFO 0
- A9 ?4 }2 j6 F( [8 y9 f内部加速度计参见pyb.Accel. - from pyb import Accel
) R- C5 l$ S; k M1 L
; Y: d( T# P, Q0 J$ \- accel = Accel()
$ F, D2 I& D$ l1 \: B+ j" L - print(accel.x(), accel.y(), accel.z(), accel.tilt())
" p9 ]: y9 h: Z& h7 k. J
|
 |Archiver|手机版|小黑屋|micropython编程爱好网
( 粤ICP备14010847号-3 )
|Archiver|手机版|小黑屋|micropython编程爱好网
( 粤ICP备14010847号-3 ) 



 发表于 2020-4-19 10:36:57
发表于 2020-4-19 10:36:57

 发表于 2020-11-15 08:13:45
发表于 2020-11-15 08:13:45