|
|
OpenMV Cam快速参考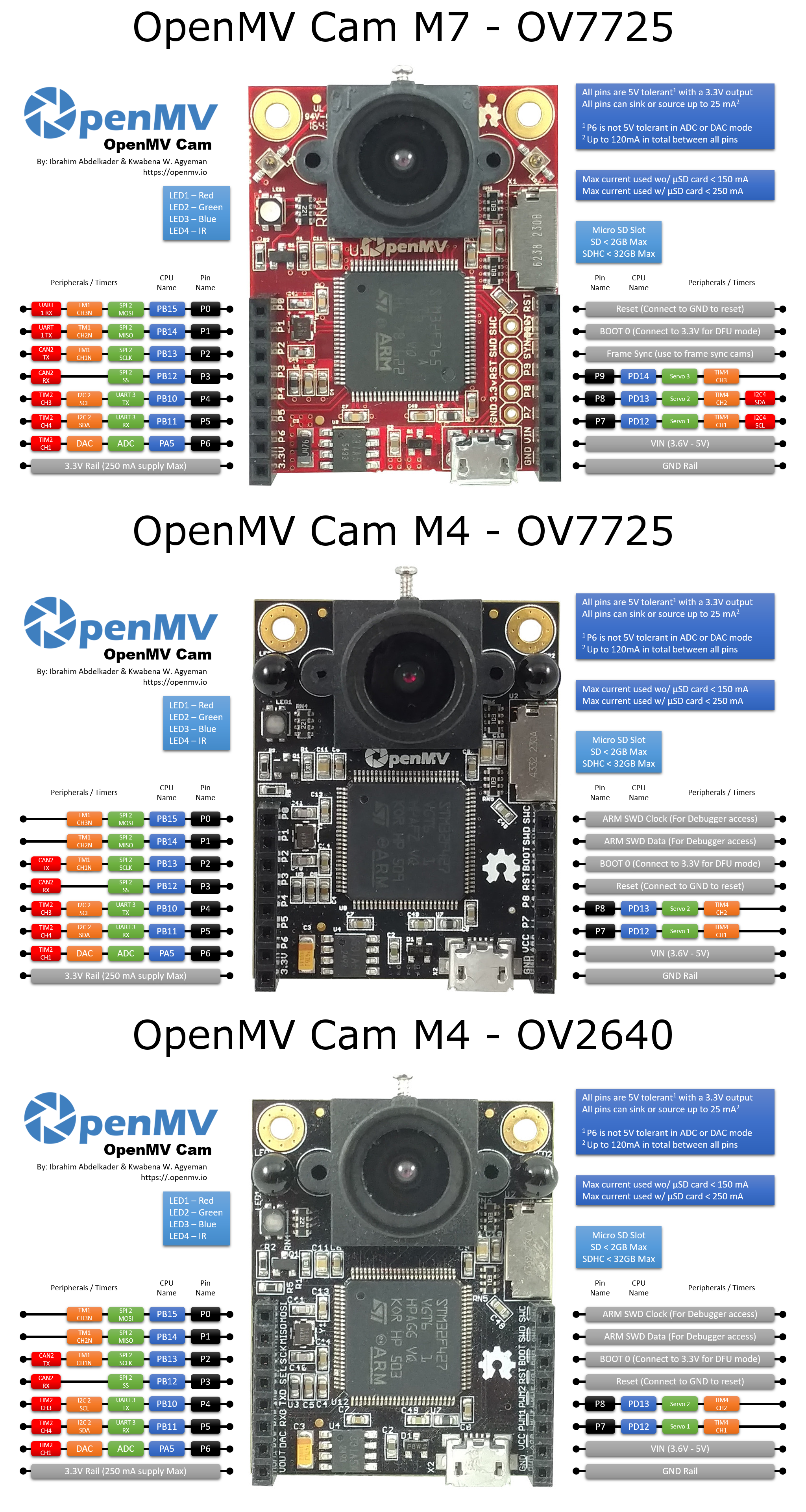 通用硬件控制 通用硬件控制See pyb. - import pyb
- pyb.repl_uart(pyb.UART(3, 9600, timeout_char=1000)) # duplicate REPL on UART(3) 在UART(3)上重置REPL
- pyb.wfi() # pause CPU, waiting for interrupt 暂停cpu,等待中断
- pyb.stop() # stop CPU, waiting for external interrupt 停止cpu,等待外部中断
延时和时间Use the time module: - import utime
- time.sleep(1) # sleep for 1 second 延时1s
- time.sleep_ms(500) # sleep for 500 milliseconds 延时500ms
- time.sleep_us(10) # sleep for 10 microseconds 延时10us
- start = time.ticks_ms() # get value of millisecond counter 获取毫秒计数器的值
- delta = time.ticks_diff(time.ticks_ms(), start) # compute time difference 计算时间差
LED 发光二极管See pyb.LED. - from pyb import LED
- led = LED(1) # 红色 led
- led.toggle()
- led.on()
- led.off()
LED Pinout: - LED(1) -> 红色 RGB LED Segment
- LED(2) -> 绿色 RGB LED Segment
- LED(3) -> 蓝色 RGB LED Segment
- LED(4) -> 红外 LEDs
引脚和GPIOSee pyb.Pin. - from pyb import Pin
- p_out = Pin('P7', Pin.OUT_PP)
- p_out.high()
- p_out.low()
- p_in = Pin('P8', Pin.IN, Pin.PULL_UP)
- p_in.value() # get value, 0 or 1
GPIO引脚分配: - Pin(‘P0’) -> P0 (PB15)
- Pin(‘P1’) -> P1 (PB14)
- Pin(‘P2’) -> P2 (PB13)
- Pin(‘P3’) -> P3 (PB12)
- Pin(‘P4’) -> P4 (PB10)
- Pin(‘P5’) -> P5 (PB11)
- Pin(‘P6’) -> P6 (PA5)
- Pin(‘P7’) -> P7 (PD12)
- Pin(‘P8’) -> P8 (PD13)
- Pin(‘P9’) -> P9 (PD14) (只在OpenMV Cam M7/H7)
所有引脚适配范围为5V,其输出为3V(在ADC或DAC模式下,P6的适配范围并不是5V)。 所有引脚最高输入或者输出25mA(所有引脚加起来最高120mA)。
舵机控制见 pyb.Servo. - from pyb import Servo
- s1 = Servo(1) # servo on position 1 (P7) 位置1的servo(P7)
- s1.angle(45) # move to 45 degrees 移动到45度
- s1.angle(-60, 1500) # move to -60 degrees in 1500ms 在1500ms内移动到-60度
- s1.speed(50) # for continuous rotation servos 连续旋转舵机
Servo Pinout: - Servo(1) -> P7 (PD12)
- Servo(2) -> P8 (PD13)
- Servo(3) -> P9 (PD14) (OpenMV Cam M7/H7 Only)
外部中断See pyb.ExtInt. - from pyb import Pin, ExtInt
- callback = lambda e: print("intr")
- ext = ExtInt(Pin('P7'), ExtInt.IRQ_RISING, Pin.PULL_NONE, callback)
GPIO Pinout: - Pin(‘P0’) -> P0 (PB15)
- Pin(‘P1’) -> P1 (PB14)
- Pin(‘P2’) -> P2 (PB13)
- Pin(‘P3’) -> P3 (PB12)
- Pin(‘P4’) -> P4 (PB10)
- Pin(‘P5’) -> P5 (PB11)
- Pin(‘P6’) -> P6 (PA5)
- Pin(‘P7’) -> P7 (PD12)
- Pin(‘P8’) -> P8 (PD13)
- Pin(‘P9’) -> P9 (PD14) (只在OpenMV Cam M7/H7)
定时器See pyb.Timer. - from pyb import Timer
- tim = Timer(4, freq=1000)
- tim.counter() # get counter value 获取计时器值
- tim.freq(0.5) # 0.5 Hz
- tim.callback(lambda t: pyb.LED(1).toggle())
定时器引脚分配: - Timer 1 Channel 3 Negative -> P0 (PB15)
- Timer 1 Channel 2 Negative -> P1 (PB14)
- Timer 1 Channel 1 Negative -> P2 (PB13)
- Timer 2 Channel 3 Positive -> P4 (PB10)
- Timer 2 Channel 4 Positive -> P5 (PB11)
- Timer 2 Channel 1 Positive -> P6 (PA5)
- Timer 4 Channel 1 Negative -> P7 (PD12)
- Timer 4 Channel 2 Negative -> P8 (PD13)
- Timer 4 Channel 3 Positive -> P9 (PD14) (OpenMV Cam M7/H7 Only)
PWM脉宽调制See pyb.Pin and pyb.Timer. - from pyb import Pin, Timer
- p = Pin('P7') # P7 has TIM4, CH1
- tim = Timer(4, freq=1000)
- ch = tim.channel(1, Timer.PWM, pin=p)
- ch.pulse_width_percent(50)
定时器引脚分配: - Timer 1 Channel 3 Negative -> P0 (PB15)
- Timer 1 Channel 2 Negative -> P1 (PB14)
- Timer 1 Channel 1 Negative -> P2 (PB13)
- Timer 2 Channel 3 Positive -> P4 (PB10)
- Timer 2 Channel 4 Positive -> P5 (PB11)
- Timer 2 Channel 1 Positive -> P6 (PA5)
- Timer 4 Channel 1 Negative -> P7 (PD12)
- Timer 4 Channel 2 Negative -> P8 (PD13)
- Timer 4 Channel 3 Positive -> P9 (PD14) (OpenMV Cam M7/H7 Only)
ADC (模数转换)见 pyb.Pin 和 pyb.ADC. - from pyb import Pin, ADC
- adc = ADC(Pin('P6'))
- adc.read() # read value, 0-4095 读取值,0-4095
ADC 引脚分配: - ADC(Pin(‘P6’)) -> P6 (PA5)
ADC模式下,P6的适配范围为3.3V,而不是5V!
DAC (数模转换)见 pyb.Pin and pyb.DAC. - from pyb import Pin, DAC
- dac = DAC('P6')
- dac.write(120) # 输出介于0-255
DAC 引脚分配: - DAC(Pin(‘P6’)) -> P6 (PA5)
DAC模式下,P6的适配范围为3.3V,而不是5V!
UART (串行总线)See pyb.UART. - from pyb import UART
- uart = UART(3, 9600, timeout_char=1000)
- uart.write('hello')
- uart.read(5) # read up to 5 bytes 读取5个字节
UART Pinout: - UART 3 RX -> P5 (PB11)
- UART 3 TX -> P4 (PB10)
- UART 1 RX -> P0 (PB15) (只在OpenMV Cam M7/H7)
- UART 1 TX -> P1 (PB14) (只在OpenMV Cam M7/H7)
SPI总线见 pyb.SPI. - from pyb import SPI
- spi = SPI(2, SPI.MASTER, baudrate=1000000, polarity=1, phase=0)
- spi.send('hello')
- spi.recv(5) # receive 5 bytes on the bus 在总线上接收5个字节
- spi.send_recv('hello') # send a receive 5 bytes 发送5个字节
SPI 引脚分配: - SPI 2 MOSI (Master-Out-Slave-In) -> P0 (PB15)
- SPI 2 MISO (Master-In-Slave-Out) -> P1 (PB14)
- SPI 2 SCLK (Serial Clock) -> P2 (PB13)
- SPI 2 SS (Serial Select) -> P3 (PB12)
I2C总线See pyb.I2C. - from pyb import I2C
- i2c = I2C(2, I2C.MASTER, baudrate=100000)
- i2c.scan() # returns list of slave addresses 返回一个从属设备地址的列表
- i2c.send('hello', 0x42) # send 5 bytes to slave with address 0x42 使用0x42地址向从属设备发送5个字节
- i2c.recv(5, 0x42) # receive 5 bytes from slave 从从属设备上接收5个字节
- i2c.mem_read(2, 0x42, 0x10) # read 2 bytes from slave 0x42, slave memory 0x10 从地址为0x42从属设备上接收2个字节,从属存储器为0x10
- i2c.mem_write('xy', 0x42, 0x10) # write 2 bytes to slave 0x42, slave memory 0x10 向地址为0x42的从属设备写入2个字节,从属存储器为0x10
I2C 引脚分配: - I2C 2 SCL (Serial Clock) -> P4 (PB10)
- I2C 2 SDA (Serial Data) -> P5 (PB11)
- I2C 4 SCL (Serial Clock) -> P7 (PD13) (OpenMV Cam M7/H7 Only)
- I2C 4 SDA (Serial Data) -> P8 (PD12) (OpenMV Cam M7/H7 Only)
|
|
 |Archiver|手机版|小黑屋|micropython编程爱好网
( 粤ICP备14010847号-3 )
|Archiver|手机版|小黑屋|micropython编程爱好网
( 粤ICP备14010847号-3 )




 发表于 2021-9-23 09:17:40
发表于 2021-9-23 09:17:40

 发表于 2021-9-23 23:15:52
发表于 2021-9-23 23:15:52
